【实例简介】手册介绍了安川机器人配套控制柜DX200的以太网/串行接口通讯功能,可搭配DX200的使用说明书一起学习本手册的使用方法于册结构本用户手册的结构如下第1章通信功能概要阐述了通信功能和接口间的关系并给出...
”安川机器人TCP C“ 的搜索结果
喷涂机器人系统创建 喷枪模型导入与安装到机器人 喷涂工作站外围设备添加 喷涂仿真设置 机器人示教编程 喷涂机器人仿真运行 文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎...
机器人与西门子S7-1214C PLC走Modbus-TCP通信手册,西门子S7-1214C与机器人走Modbus Tcp通信设置





圆弧运动指令(MoveC)
如果您想在安川机器人控制系统中使用 Modbus TCP 进行通讯,可以通过编写 modbus tcp程序 来实现。在安川motoplus 中,可以使用 C/C++ 或者 Script 等多种编程语言来编写 modbus tcp程序。具体的实现方法需要根据您...
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:...MotoSim EG-VRC是安川机器人虚拟仿真与离线编程的专用软件,内部集成了安川机器人所有的工艺应用,如弧焊焊接应用、点焊焊接应用、搬运应用、喷涂
CC-LINK-IE
ZNL-Z07多功能机器人实训工作站 一、概述 ZNL-Z07多功能机器人实训工作站如图以关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光...
整数和浮点数的机器表示 在机器内部,不论是一个整数还是浮点数,都是以一个二进制串的形式存储。 整数可能是原码,补码表示,浮点数有阶码尾数两部分构成,无论怎样都是一个二进制串,但是这个二进制串如何表示...

-----------☺----------全部资料幻灯片和示例代码:http://download.csdn.net/detail/zhangrelay/9772491 ----------☻----------ROSIN: Why Should You Care About Quality?----------部分内容如下----------#!...
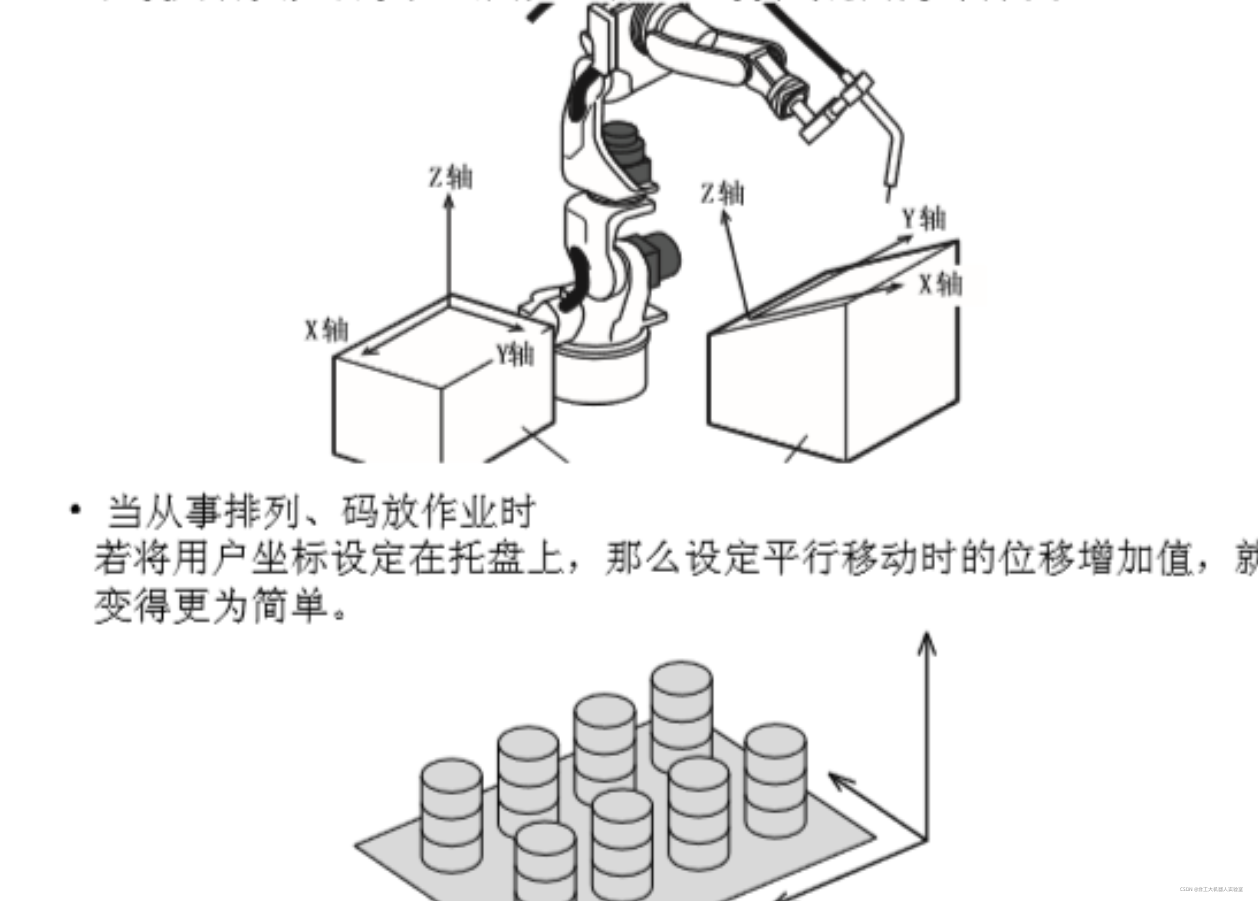
当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降低编程的难度和...


当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降低编程的难度和...
一、概述当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降低编程的...
原网页: Industrial -Tutorials 1. ROS-Industral 教程概述 ROS-Industrial 包括很多软件包,软件包可以分为两类:通用软件包和供应商特定软件包。通过软件包的wiki链接可以找到软件包的介绍。...

主/从信号数则代表着主站和从站需要设定的信号的位数。进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>1....进入辅助=>6.输入/输出信号=>8....注意:机器人的IP需要和PLC的IP设置在同一网段内。
http://C:\Users\86136\Desktop\1欧姆龙CJ2M PLC与库卡C4.pptx
推荐文章
- 套接字编程-实现基于TCP/IP和UDP的客户端和服务器-程序员宅基地
- 数字信号处理公式变程序(五)——仿matlab的spectrogram函数(STFT)_load chirp-程序员宅基地
- Halcon的一维码和二维码解码步骤和技巧_halcon 一维码,二维码-程序员宅基地
- C#中wpf使用Devexpress画图:柱状图,饼状图,散点图,曲线图_devexpress22.2.4 wpf 教程-程序员宅基地
- 华为光猫电源power,pon、los、lan,引出 无源光网络PON的原理-程序员宅基地
- 对mtcnn的人脸对齐的理解_tform.estimate-程序员宅基地
- Go+Wails学习笔记(三)Go与Js数据交互_wails runtime-程序员宅基地
- 自从上了 SkyWalking,睡觉真香!!-程序员宅基地
- POJ 2181-Jumping Cows_2181jumping cows-程序员宅基地
- 2021-11-13-程序员宅基地